Project Overview
The Computer Vision Rodent Tracking System is a specialized tool designed to automate the tracking and analysis of rodent behavior in laboratory settings. Built using Python and OpenCV, this system eliminates the need for manual observation and data collection, significantly improving research efficiency and data accuracy.
Key Features
Real-time Tracking
- Multi-animal tracking capability
- Color-based identification for different subjects
- Movement path visualization
- Zone entry/exit detection
Behavior Analysis
- Automatic detection of common behaviors (resting, grooming, exploration)
- Social interaction monitoring
- Activity level quantification
- Posture and orientation analysis
Environmental Integration
- Near-IR illumination compatibility for dark cycle recording
- Integration with Raspberry Pi cameras for distributed monitoring
- Low-light condition optimization
- Time-synchronized environmental data recording
Data Analysis & Export
- Comprehensive metrics calculation (distance traveled, time in zones, etc.)
- Heat map generation of movement patterns
- Statistical summary reports
- Data export to CSV for further analysis
Technical Implementation
Hardware Components
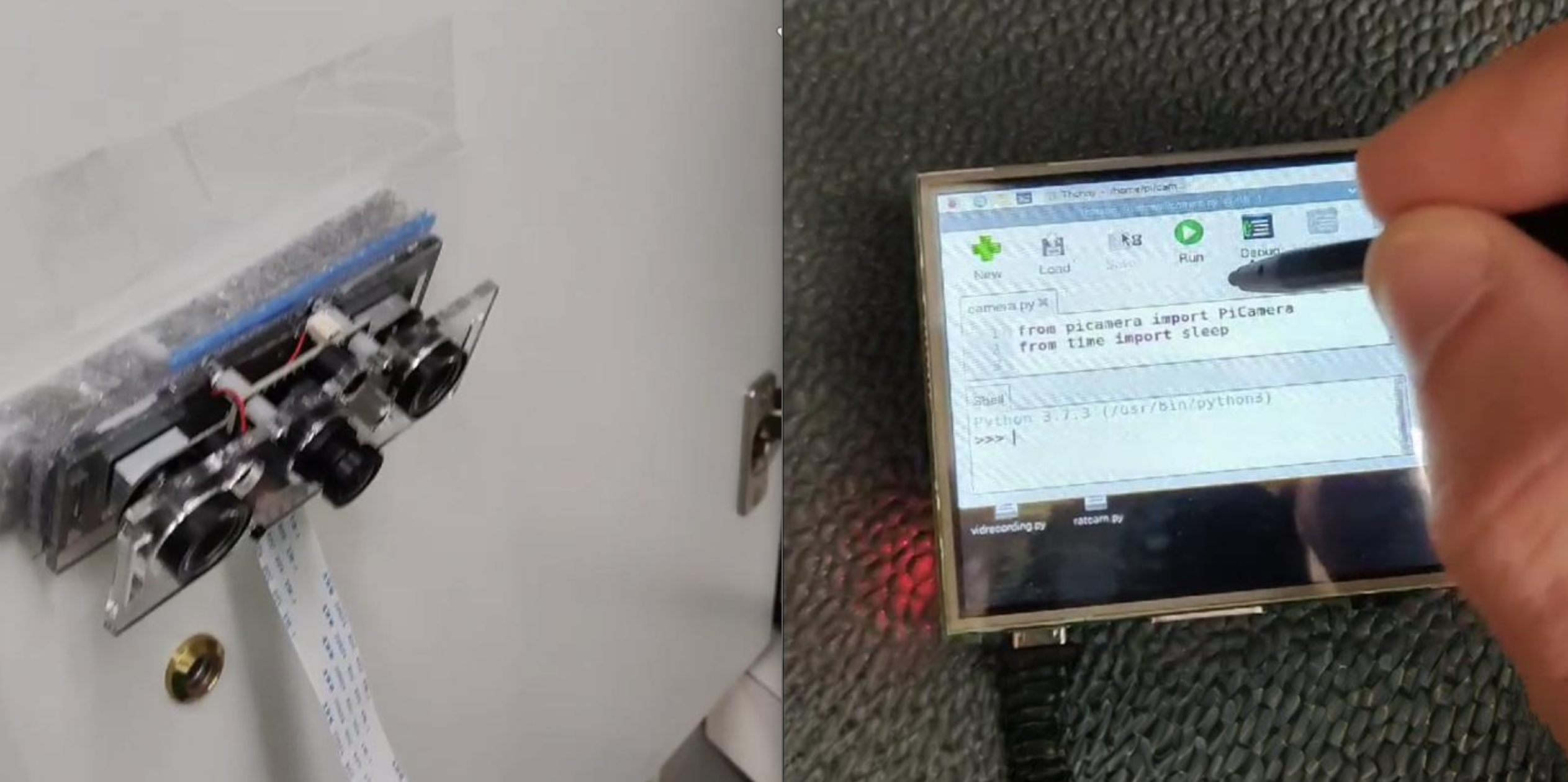
- Raspberry Pi 4 with PiCamera
- Near-IR LED illumination array
- Custom 3D-printed camera mount system
- Dedicated monitoring station
Software Architecture
- Python 3.8 core application
- OpenCV 4.5 for image processing and analysis
- NumPy for numerical operations
- Pandas for data management
- Matplotlib and Seaborn for visualization
- SQLite for session storage
Tracking Algorithm
The system employs a combination of techniques:
1. Background subtraction to isolate moving objects
2. Color thresholding for subject identification
3. Contour detection and analysis for posture estimation
4. Kalman filtering for tracking prediction and occlusion handling
Development Process
This project evolved through several iterations based on real laboratory needs. Starting with basic motion detection, it gradually incorporated more sophisticated tracking algorithms and behavior analysis capabilities. Regular feedback from researchers guided feature development and refinement.
Challenges and Solutions
Challenge: Distinguishing between similar-colored animals
Solution: Implemented a combination of color thresholding and spatial positioning tracking
Challenge: Maintaining tracking during occlusions or close interactions
Solution: Applied Kalman filtering to predict movement and recover tracking after occlusion events
Challenge: Low-light recording conditions
Solution: Developed near-IR illumination system and camera settings optimization
Results and Impact
The system has been successfully deployed in several behavioral neuroscience studies, resulting in:
- 90% reduction in manual observation time
- Increased data granularity (30 fps vs. spot sampling)
- Improved consistency in behavior classification
- Novel insights into subtle movement patterns
- Enhanced reproducibility of behavioral experiments
Future Directions
- Deep learning integration for more sophisticated behavior recognition
- 3D tracking using multiple camera perspectives
- Cloud-based data storage and analysis
- Web interface for remote monitoring